30 ноября 2022 г.
28 ноября 2022 г.
27 ноября 2022 г.
Реверсивный инжиниринг
Реверсивный инжиниринг (реинжиниринг, reverse-engineering) – процесс копирования объекта по уже готовому образцу, способ получения 3D-моделей и чертежей готового изделия по данным 3D-сканирования.
Метод обратного проектирования применим для любой сферы промышленности и широко применяется в машиностроительной, аэрокосмической, судостроительной и других областях производства.
Обратное проектирование деталей, оборудования, зданий и сооружений (bim-моделирование) производиться тогда, когда требуется:
- восстановление утраченных деталей;
- восстановление изношенных или вышедших из строя деталей;
- сохранение информации об объектах для их дальнейшего ремонта или воспроизведения.
Реверс-инжиниринг ускоряет и упрощает производственные процессы
С помощью современных высокоточных технических решений – 3D-сканеров и программного обеспечения – метод обеспечивает несколько важных преимуществ:
- Скорость: многократное ускорение измерений по сравнению с классическим методом: от нескольких дней до нескольких часов или минут.
- Точность: сканирование позволяет избежать накопленной ошибки при снятии размеров.
- Универсальность: воспроизведение геометрии любой сложности и изделия практически любых габаритов.
- Контроль при проектировании: быстрая и наглядная проверка отклонения геометрии изделия от 3D-модели в специализированных программах.
Обратное проектирование состоит из следующих шагов:
Обратный инжиниринг в машиностроении и других отраслях применяется, если производитель исходного изделия не предоставляет сведений о структуре, методах создания объекта или они были утеряны. В процессе обратного проектирования изделий мы проходим несколько этапов для получения всей необходимой информации об объекте:
- Разборка готового изделия на детали (при необходимости).
- Определение применяемых в производстве материалов.
- Трехмерное сканирование, получение CAD-модели.
- При необходимости – снятие размеров других элементов устройства.
- Создание рабочей модели, подгонка и проверка.
- Разработка чертежей.
Общий процесс воспроизведения детали с участием обратного проектирования можно представить так:

Определения химического состава материала
Создание 3D-модели – только первый этап обратного проектирования. Для создания качественного изделия не менее важно определить марку материала и его физико-химические свойства.
Например, для металлического изделия могут быть проведены исследования:
- определение марки металла и сплава;
- определение механических свойств;
- динамические испытания;
изменение твердости.

3D Control
Ведущие мировые 3D-системы и ПО Hexagon, Aicon, 3D Systems и другие.
3D Control образует комплексное решение для воспроизведения деталей, оборудования и сооружений: от 3D-сканирования и моделирования до создания готовой конструкторской документации для производства:
- моделирование на основе сканированных данных;
- индивидуальная разработка моделей;
- разработка параметрических моделей;
- подготовка конструкторской документации;
- программная реконструкция поврежденных, утраченных компонентов изделия.
Пример работы специалиста по обратному проектированию детали.
23 ноября 2022 г.


22 ноября 2022 г.
УПРАВЛЕНИЕ ЩЁТОЧНЫМИ МОТОРАМИ
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
Реле
При помощи обычного реле можно просто включать и выключать мотор по команде
digitalWrite(пин, состояние)
, прямо как светодиод: При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать: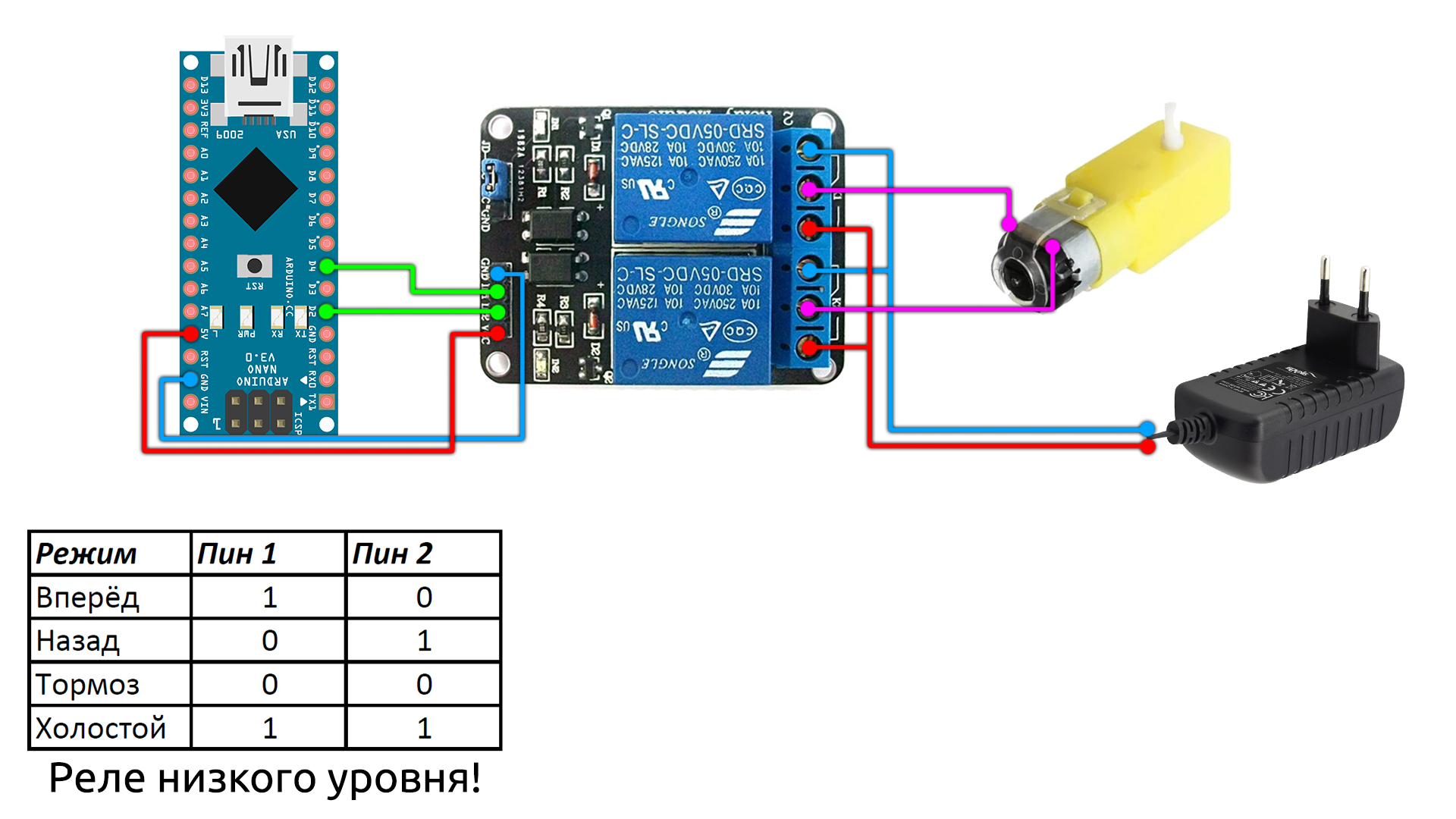 Купить модуль реле можно
Купить модуль реле можноРеле aliexpress, aliexpress, искать
Мосфет
Полевой транзистор, он же мосфет, позволяет управлять скорость вращения мотора при помощи ШИМ сигнала. При использовании мосфета обязательно нужно ставить диод, иначе индуктивный выброс с мотора очень быстро убьёт транзистор. Скорость мотора можно задавать при помощи ардуиновской
analogWrite(пин, скорость)
. 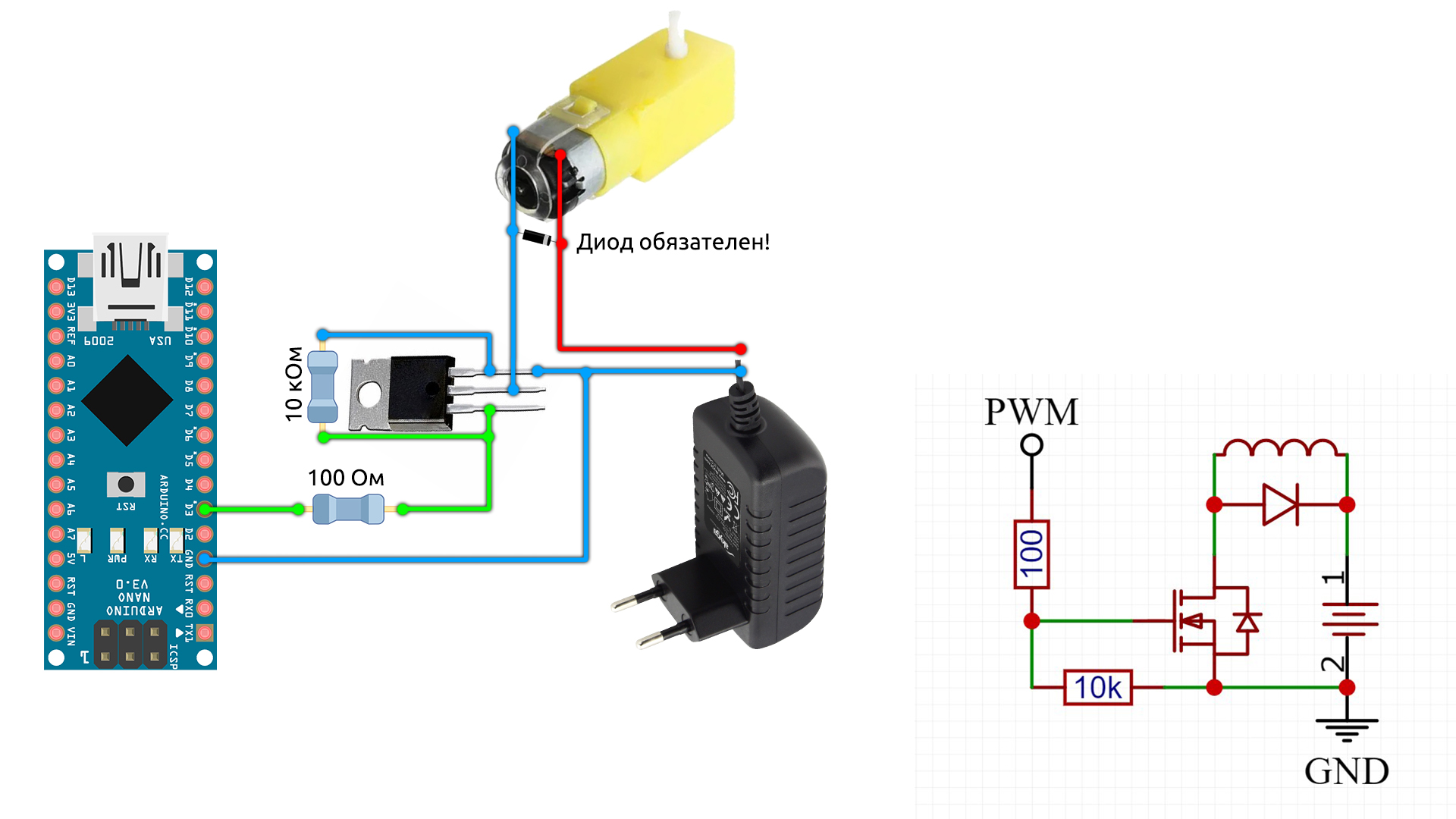 Вместо “голого” мосфета можно использовать готовый китайский модуль:
Вместо “голого” мосфета можно использовать готовый китайский модуль: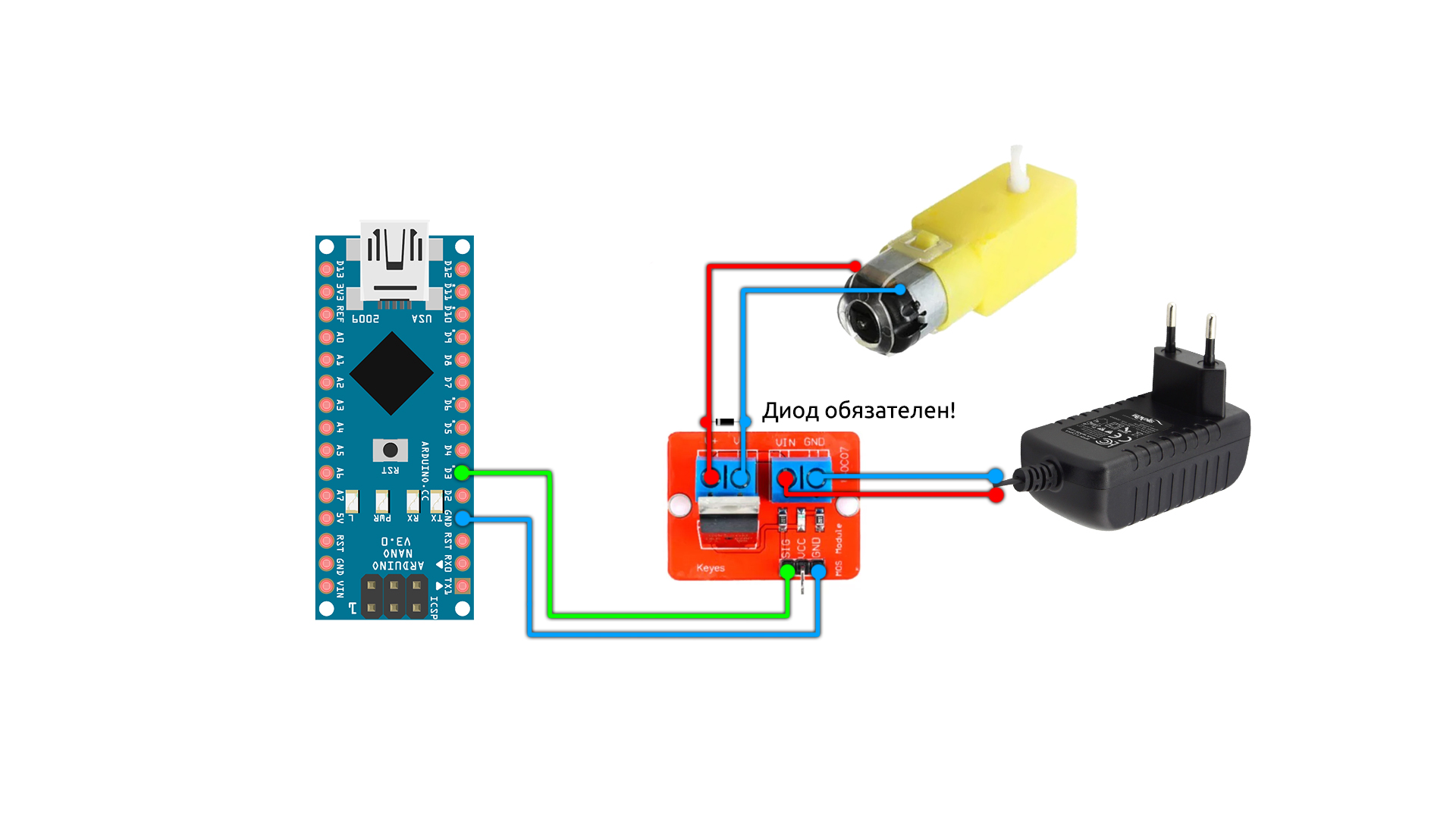 Купить мосфет модуль можно на Aliexpress:
Купить мосфет модуль можно на Aliexpress:Мосфет модуль aliexpress, aliexpress, искать
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора: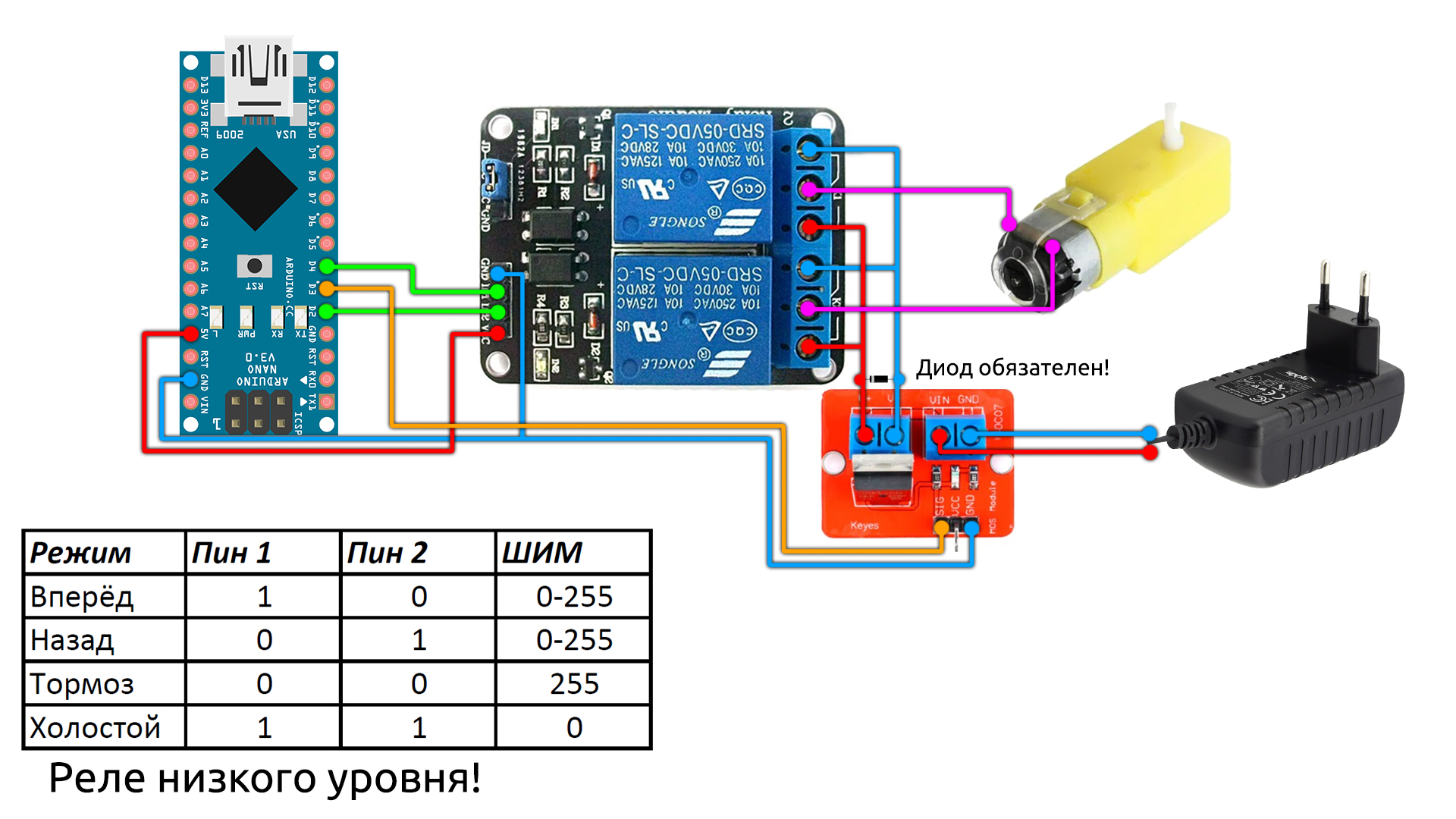


Специальный драйвер
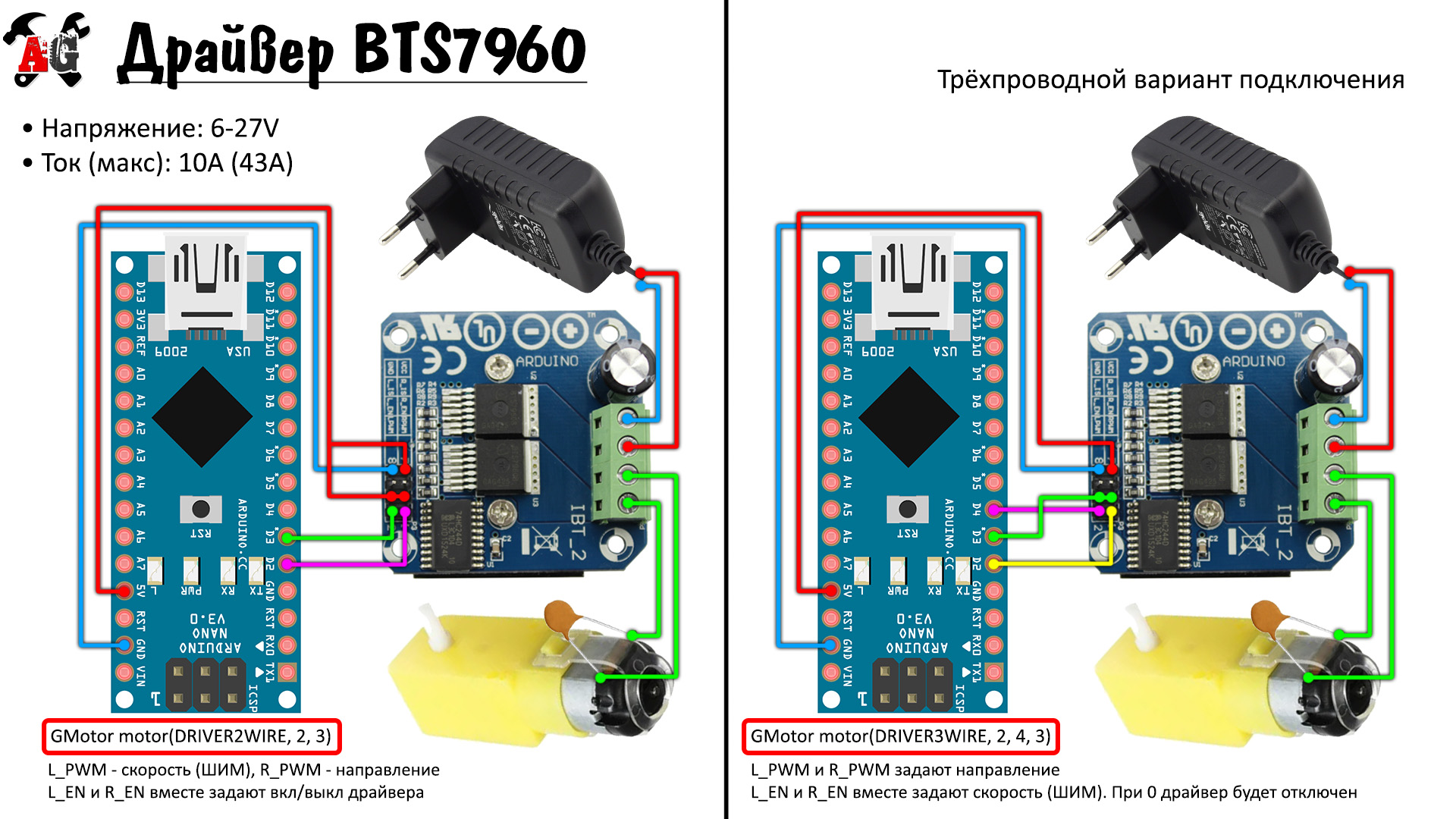
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | ~Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить |
| L9110S | 2.5-12V | 0.8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
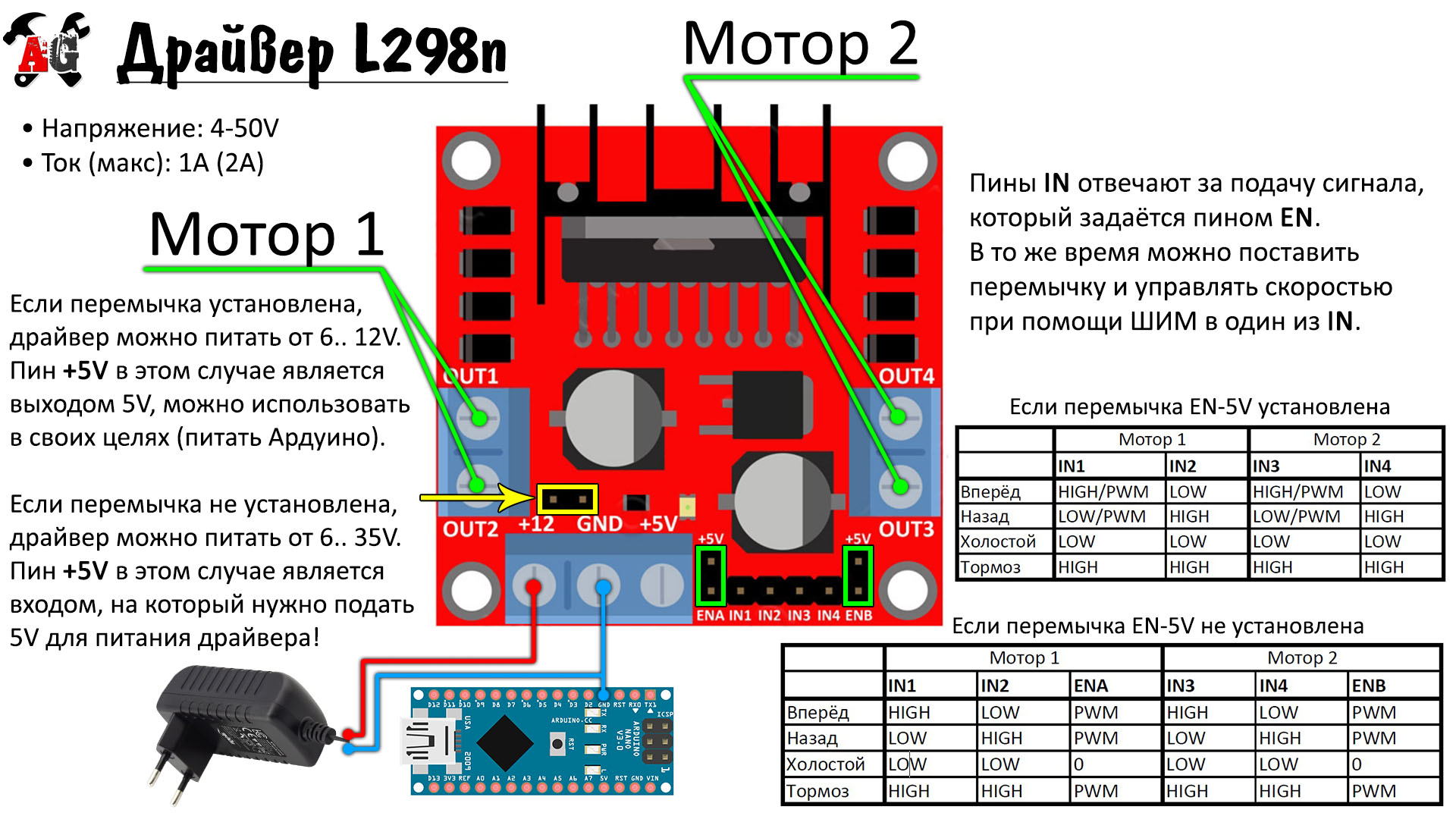

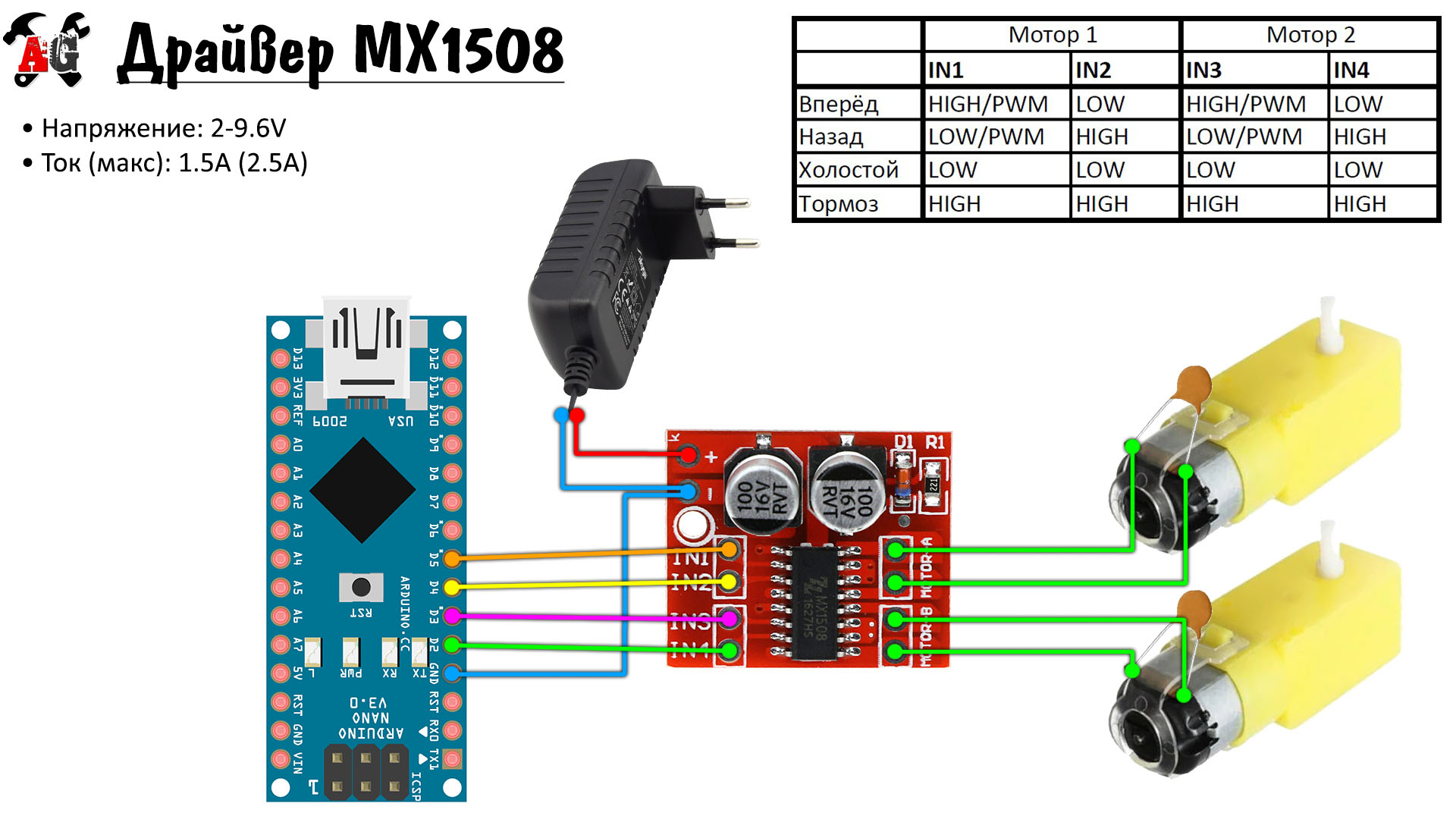
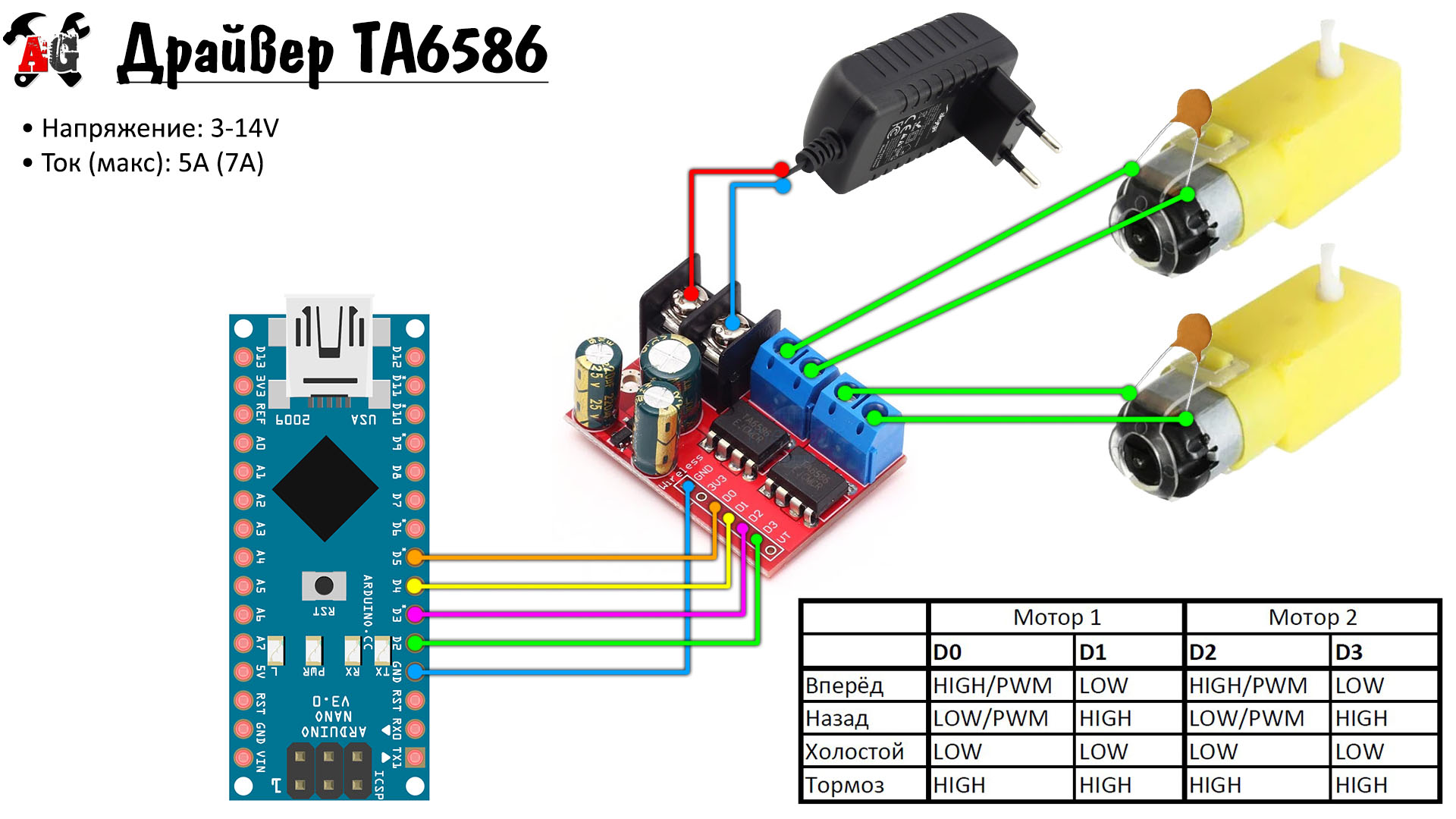


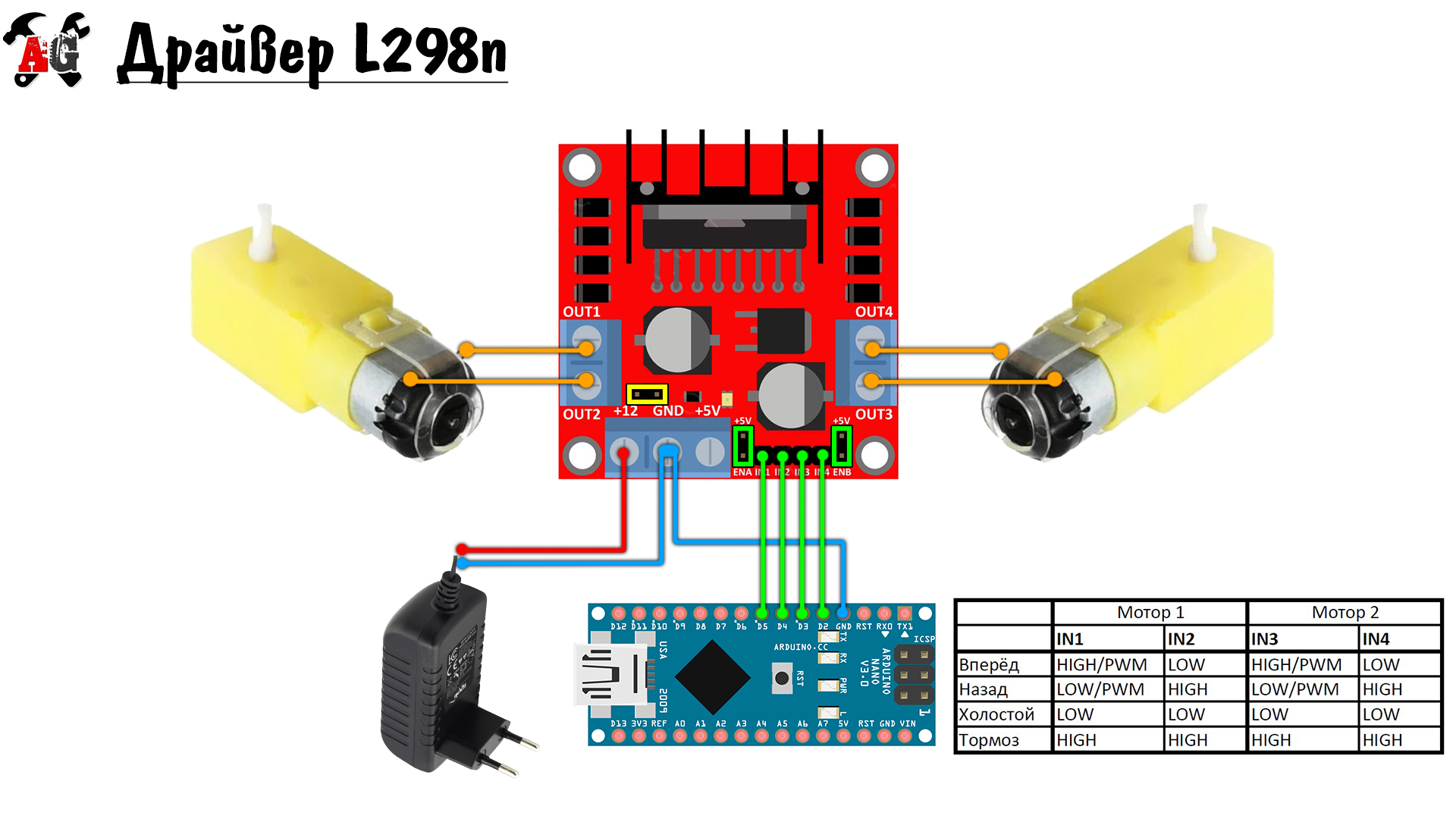
Пины направления управляются при помощи
digitalWrite(pin, value)
, а PWM – analogWrite(pin, value)
. Управление драйвером по двум пинам может быть двух вариантов:Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
- Контроль скорости и направления вращения
- Работа с ШИМ любого разрешения
- Программный deadtime
- Отрицательные скорости
- Поддержка всех типов драйверов
- Плавный пуск и изменение скорости
- Режим “минимальная скважность”
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства. Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
- При работе с драйвером и управлением в обе стороны диод ставить не нужно и даже нельзя!
- При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx) или диоды Шоттки (например серии 1N58xx).
- Максимальный ток диода должен быть больше или равен максимальному току мотора.
- Защитный диод, принимающий на себя обратный выброс ЭДС самоиндукции, также называется шунтирующим диодом, снаббером, flyback диодом.
- В природе существуют мосфеты со встроенным защитным диодом. Этот диод является отдельным элементом и такой мосфет обычно имеет нестандартный корпус, читайте документацию на конкретный транзистор.
- Диод, который показан на схематическом изображении мосфета, не является защитным диодом: это слабый и медленный “паразитный” диод, образованный при производстве транзистора. Он не защитит мосфет от выброса, нужно обязательно ставить внешний!
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
Видео



Полезные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту (alex@alexgyver.ru)
Подписаться на:
Сообщения (Atom)
-
В рамках предупреждения угрозы терроризма в обществе предлагаю посмотреть документальный фильм о реальных причинах терроризма. https://www...
-
https://chromewebstore.google.com/detail/разблокировать-youtube/cnodohbngpblpllnokiijcpnepdmfkgm?hl=ru
-
Здравствуйте ребята. На урок принести всем хорошие канцелярские ножи. Стержень для клеевого пистолета. Обязательно плотный картон. Будем п...
-
 1. Выдвигать небольшую часть лезвия. 2. Работать канцелярским ножом на рабочей доске. 3. Выполняя разрезы, крепко держать нож одной рукой, а...
1. Выдвигать небольшую часть лезвия. 2. Работать канцелярским ножом на рабочей доске. 3. Выполняя разрезы, крепко держать нож одной рукой, а... -
Изучайте информатику и робототехнику дома без робота. VEXcode VR позволяет вам программировать виртуального робота, используя блочную сред...





